
Your Partner in Advanced Actuation
Yaxonn helps mobility, robotics, and industrial companies design, prototype, and validate compact, robust, and high-torque actuator and motor-driven systems
When standard actuator architectures are not enough
Yaxonn works on technical problems where torque, compactness, robustness, sensing, control interfaces, and validation constraints must be treated as one system
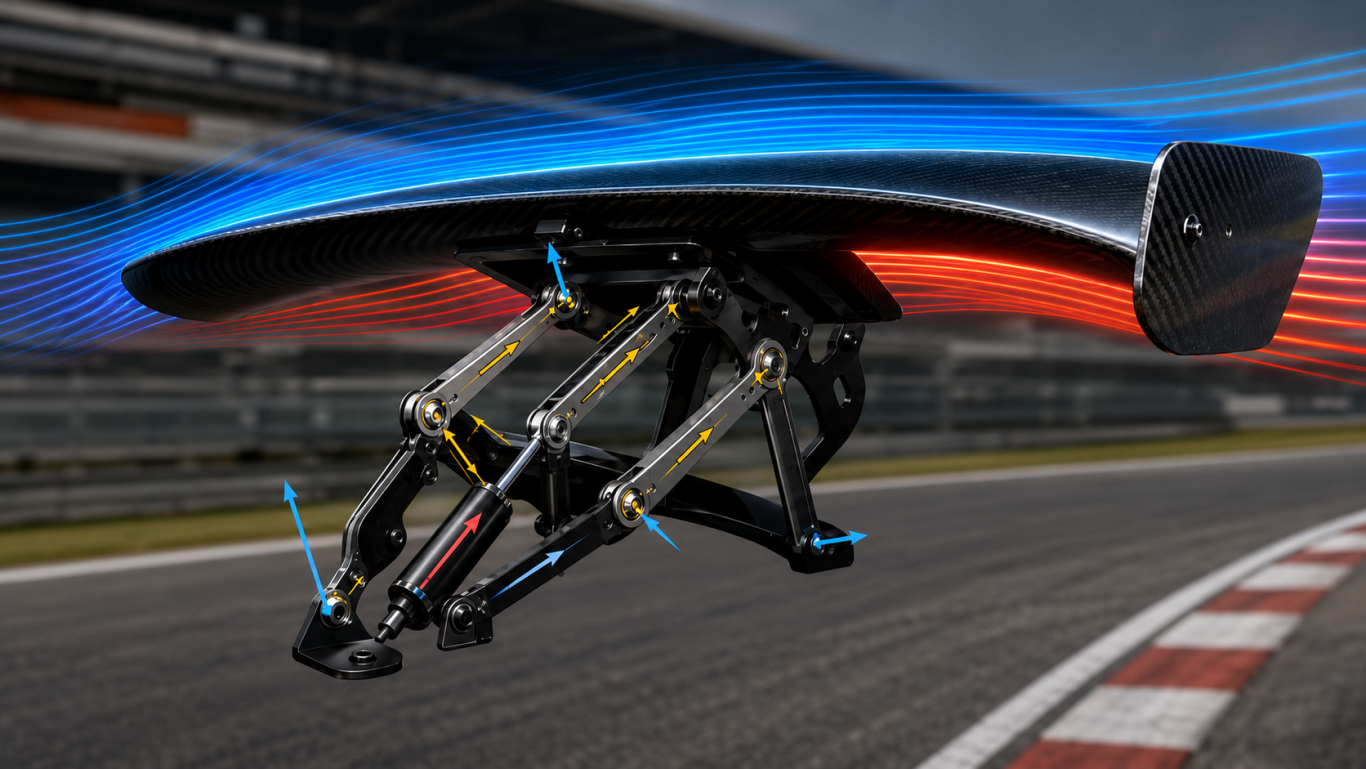
High torque in compact packaging
Architecture decisions for systems requiring high force or torque density under severe packaging constraints.
Low-speed, high-load performance
Motor and actuator concepts optimized for operating points where generic solutions often become inefficient or oversized.
Robustness under real constraints
Mechanical, electromagnetic, thermal, environmental, and validation constraints integrated from the start.
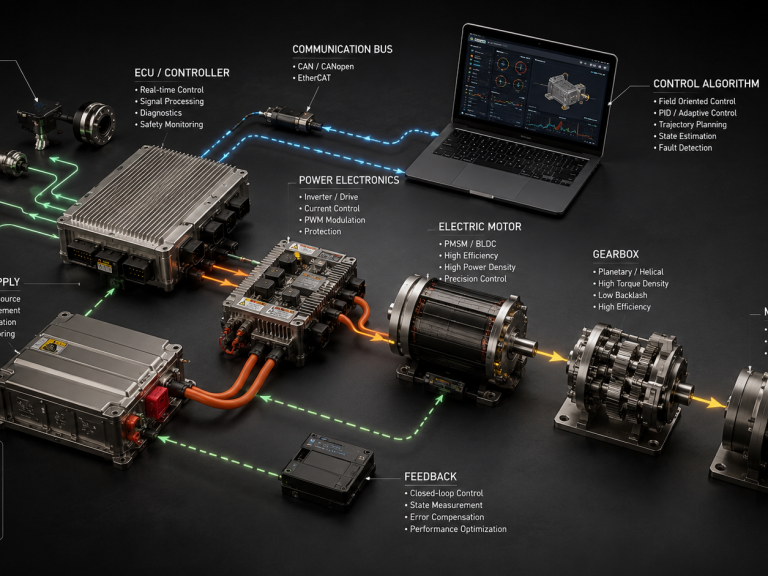
System-level integration
Mechanical design, electric motor, sensing, brake, control interface, and packaging aligned into a coherent architecture.
Simulation-to-test correlation
Models used to support decisions, reduce risk, and converge toward measurable prototype performance.
Prototype maturation
From early feasibility to functional demonstrator and validation plan, with industrial development discipline.
From architecture to a validated prototype
The strongest electromechanical systems are not created by optimizing parts independently. They are created by selecting the right architecture, validating the core physics early, and closing the loop between simulation, prototype, and test
Define the system logic
Topology selection, interfaces, load cases, sensing strategy, motor concept, risk map, and development path.
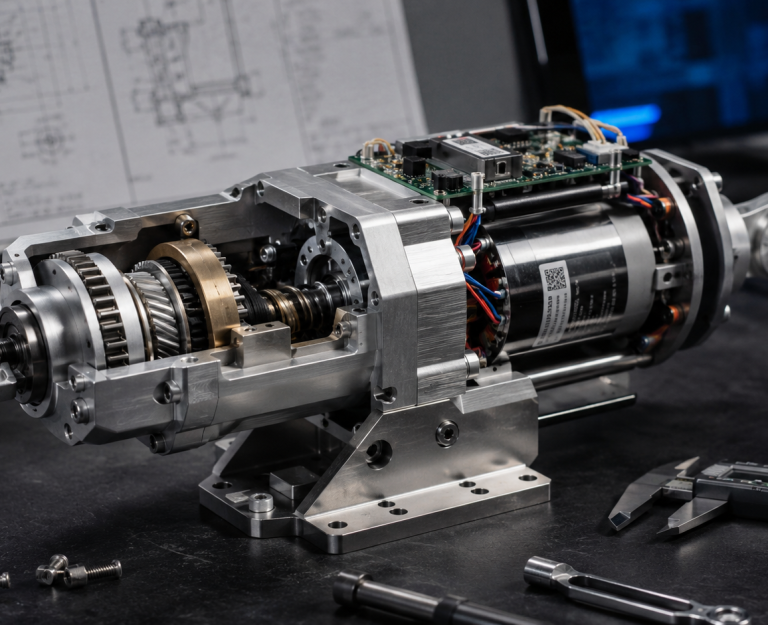
Build the proof
CAD concept, electromagnetic sizing, mechanical integration, supplier interface, and demonstrator specification.
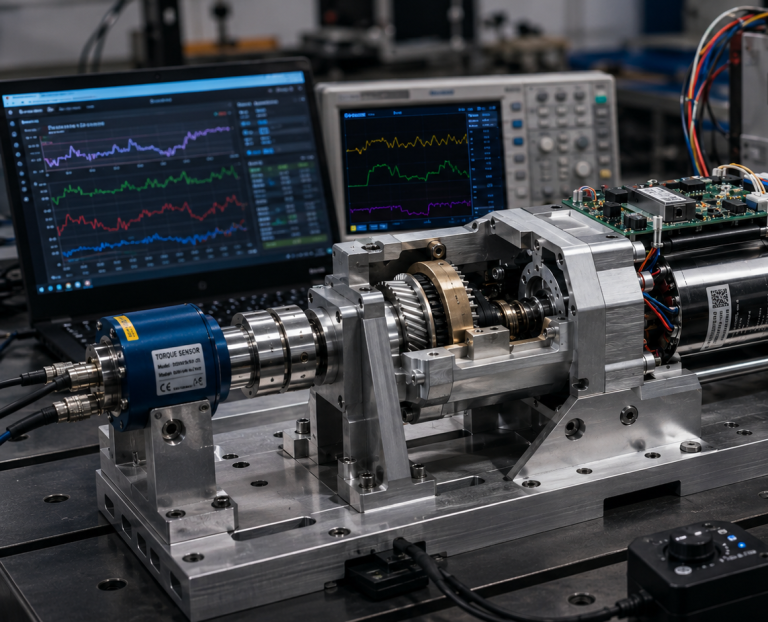
Close the engineering loop
DVP, instrumentation, performance tests, model correlation, and design recommendations.